Our second main field season concluded this September, we obtained excellent data again despite a historically rainy summer in interior Alaska. Our fieldwork is now complete. Blog updates have been slow to come, because we now have our hands full with data to analyze and papers to write. Updates will become more frequent as those efforts come to fruition. In the meantime, here’s a particularly nice example of a grayling drift feeding, from our new 2016 data:
A model we’re developing examines the idea that the behavior of drift-feeding fish is largely determined by cognitive limits on their ability to process visual information. We’ve hypothesized that the fish focus their efforts on a particular region (for example, within a 10 cm radius of their snout), or on particular types of prey, to avoid sensory overload from trying to search too much space or sort through too many drifting items at once. Even with this focus, 91% of the foraging maneuvers of juvenile Chinook salmon in the Chena River are directed at items they reject (by abandoning the chase or spitting things out), and it’s obvious on video that there’s far more debris present than what the fish actually pursue.
But how much is there, exactly?
It’s easy to collect the debris with a drift net and weigh it, but that doesn’t tell us how many pieces there were, nor how big they were — both crucial pieces of information for understanding the visual challenge facing a fish as it tries to locate prey amongst the debris. To get that information, we’re developing a new technique based on computer vision. We use a DSLR to take thousands of pictures of water flowing through a well-lit rectangular chamber against a dark background. Here’s the first version of that contraption in the Chena River a few days ago:
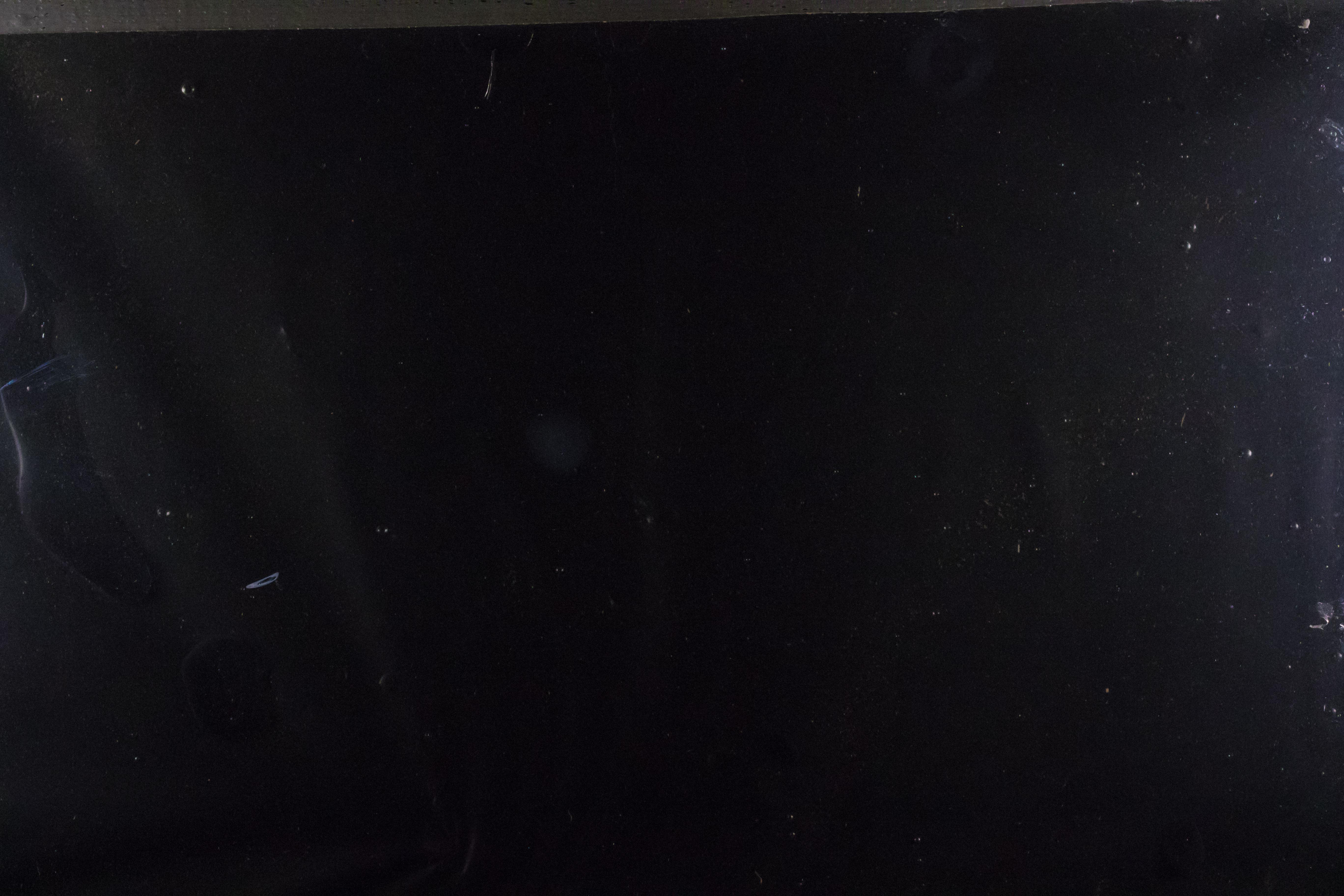
We took a picture per second to get around 2,500 pictures that look like this (click it to view full size):
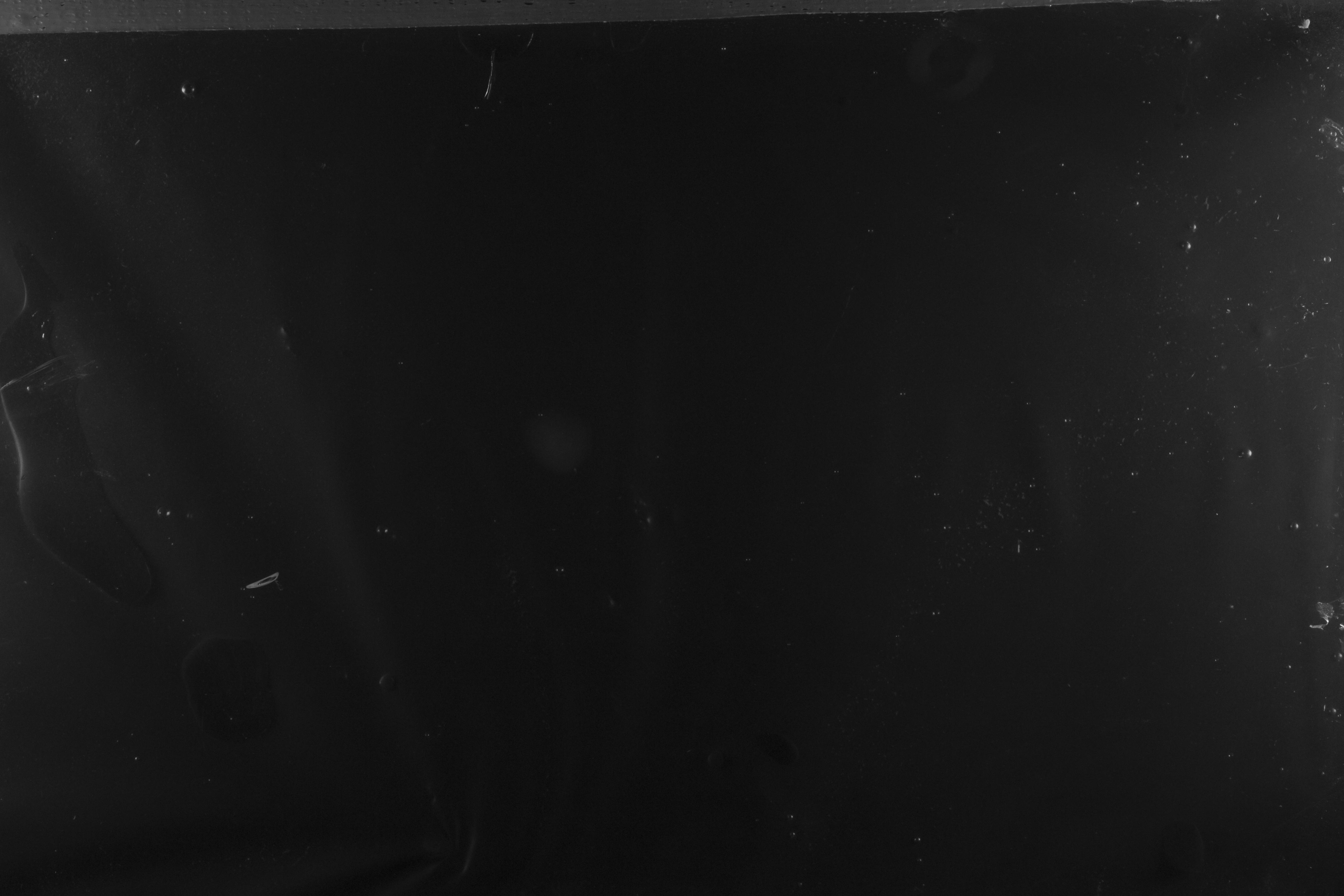
Most of that junk against the black background is stuck to the chamber somehow, not actual drifting debris. We can get a picture that excludes the real drifting stuff (or anything that’s moving) by taking the average (median) of ten consecutive pictures, a technique borrowed from astronomy. Here’s the average (which was also converted from color to grayscale to speed up the calculations):
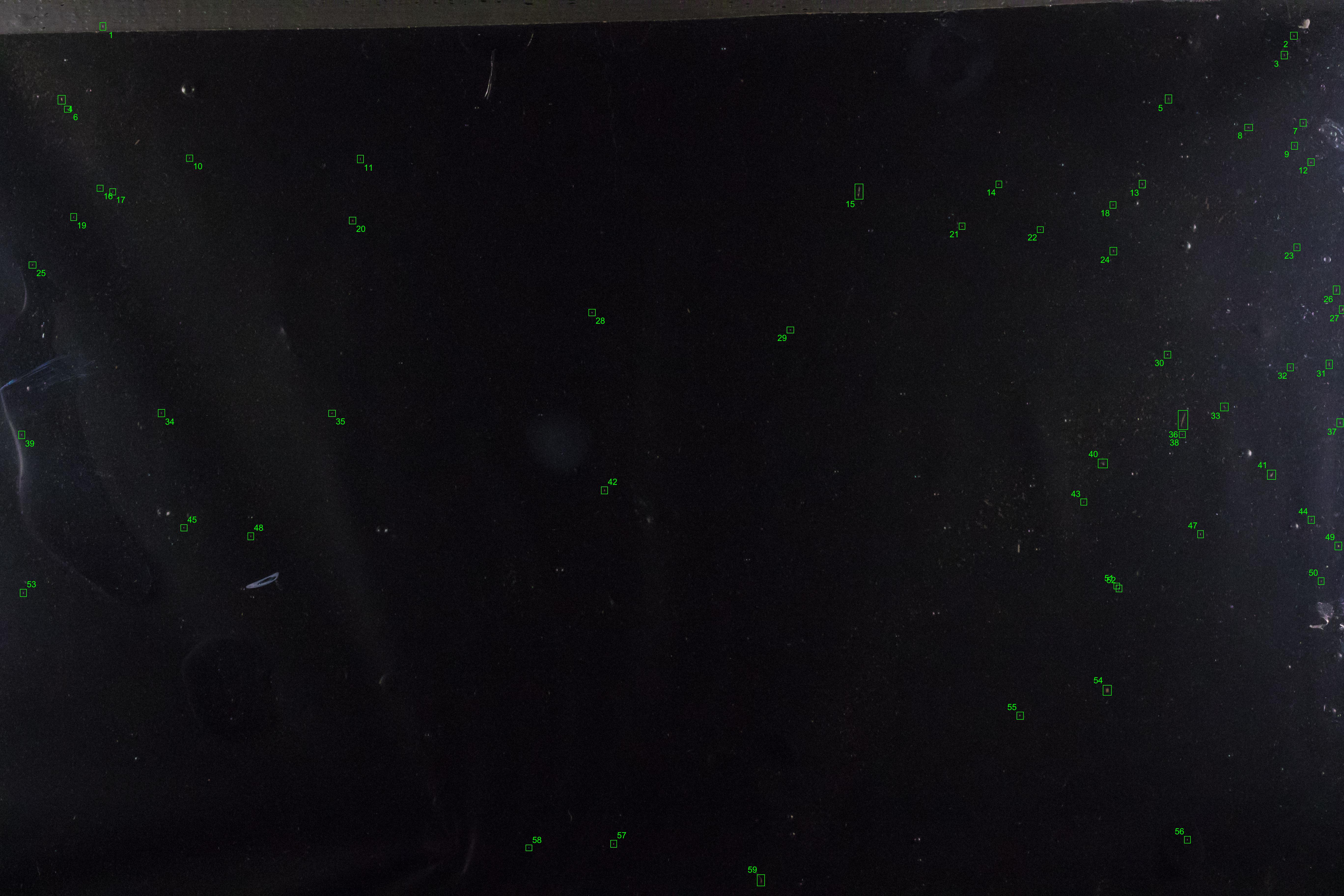
It hardly looks any different. But if we subtract this background from one of the individual images containing drifting items, we theoretically get an image with only the drifting items. The reality is a bit messier, because some of the non-drifting items change slightly in appearance between frames and can show up in the subtracted image, but we have a nice bag of tools for dealing with that. In the end, the process lets us pick out almost all the drifting debris, highlighted and numbered in green boxes in the image below:
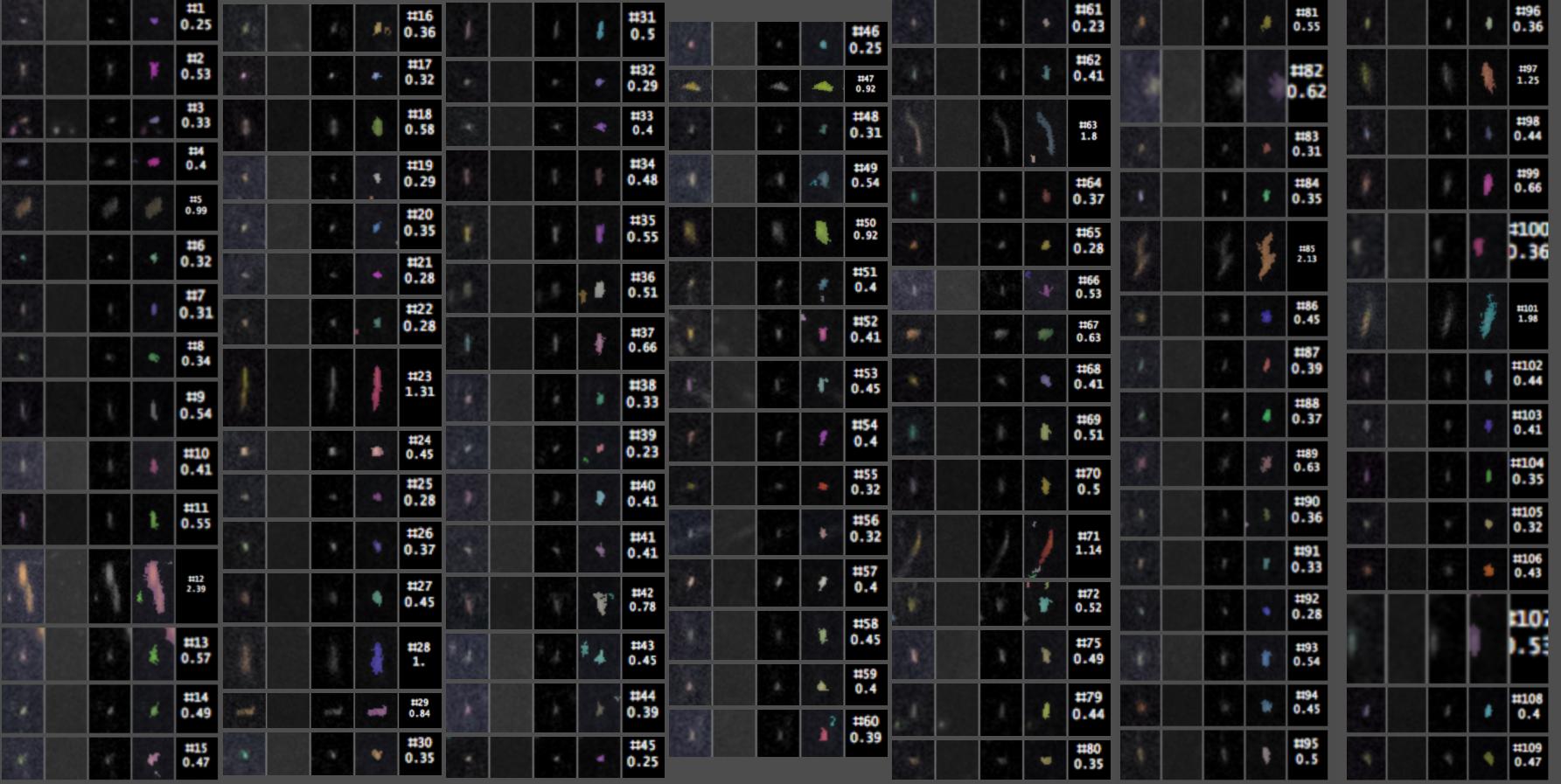
The detected particles can then be counted and measured. Here are the close-ups, with the index # of each particle listed above its length in millimeters. The four images of each particle, from left to right, are from (1) the original image, (2) the median background, (3) the original minus the median background, and (4) a false-color overlay showing which pixels were actually counted as part of the particle.
Here’s another one, just because they’re pretty:
It takes about 30 seconds for the computer to crunch one image, so an overnight program run will allow us to count and measure tens of thousands of debris particles from several cubic meters of water.
We won’t need to do this every time we go in the field to observe fish. The particle size composition and average weight per particle probably don’t change too much within each stream at normal water levels, although they may be very different in different streams. So we’re planning to run this system alongside a drift net, a few times per stream, to establish relationships between weight of debris in the net and debris counts/sizes from the images. Then we’ll be able to reasonably infer debris counts and sizes based on debris weights in the nets at all our other study sites.
This was the very first test of this whole idea, and as expected there are some little problems, like a roughly hourglass-shaped region in the middle of the image where not all the debris particles were detected. We have easy fixes for every problem identified so far, and are going to get some really interesting data when we deploy this system in the field next summer.
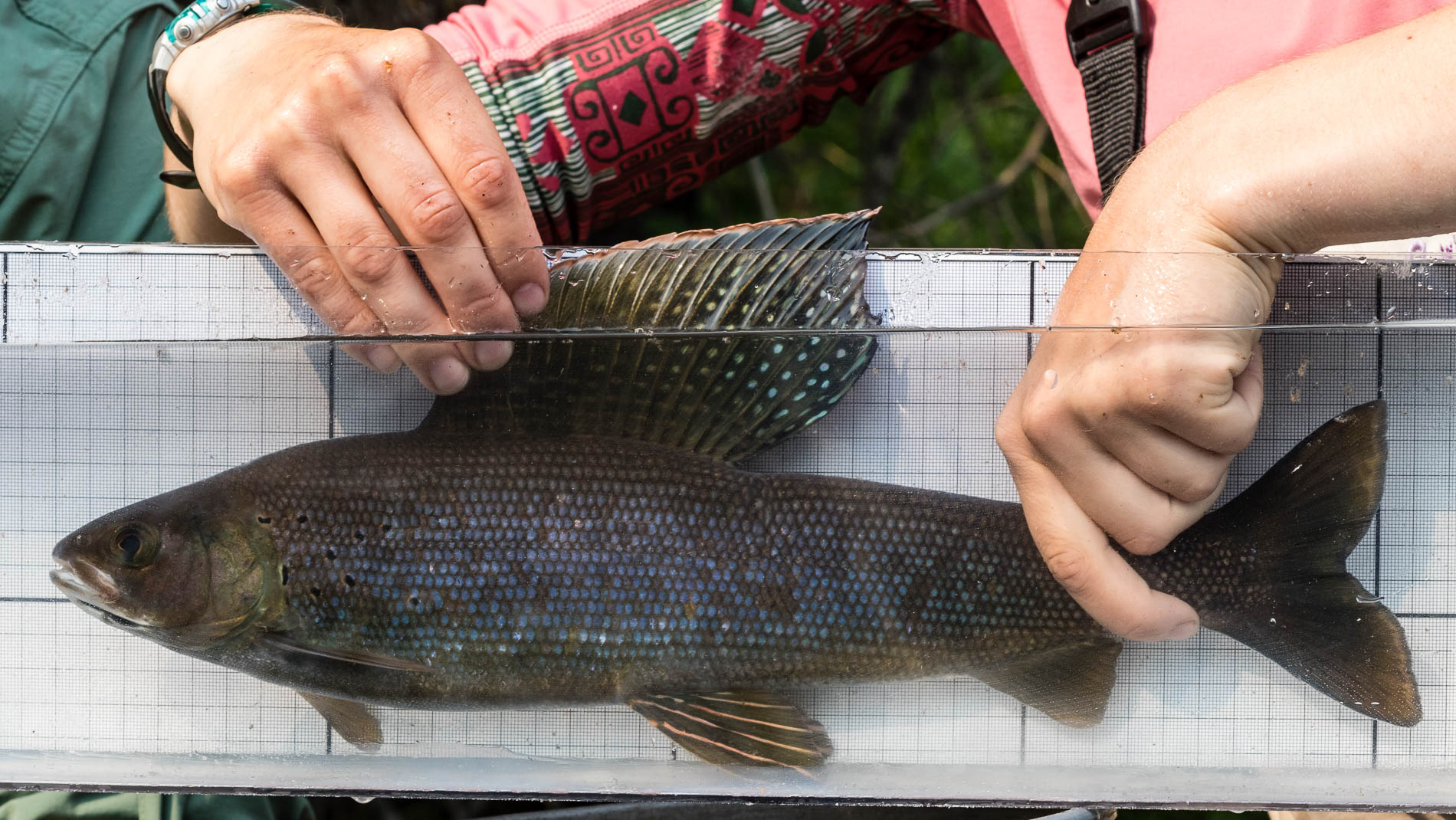
Our fieldwork consists of recording feeding fish on video, then capturing them (or their neighbors, if necessary) and harmlessly collecting their stomach contents to see what they ate during our observations. We’ll then compare these data with model predictions. We take photos of each fish we stomach sample, from both sides, so we can compare their appearances (spots, parr marks, scars, etc.) and see which stomach samples correspond to which fish we observed on video.
We also accomplish two tasks at once by photographing each fish against a ruler-like grid to measure its length. We started out with a storebought 1/8-inch grid (pink in the pictures), but then used custom black and white metric grids for most of the summer (with progressively thicker marks at 1, 10, and 100 mm).
After using photo software (Lightroom) to crop/straighten all the fish images and add metadata (such as species, length, and left/right view) I sent the whole batch to Mathematica to organize all the metadata into spreadsheets and generate some graphics. Here are all the fish we physically sampled this summer, from the left (click the image to see it full-size):
And the other side of all the same fish:
And here are collages of each species, with image size being proportional to the size of the fish. Juvenile Chinook salmon:
Dolly varden:
Arctic grayling:
The above images are mostly just for fun. The main application of these images, besides length measurement, is to group them into “reference cards” for comparing fish on video to the fish we caught at each of our 31 study sites. Here are a couple of those, showing each fish from both sides:
We just completed a 15-day marathon of sampling to begin our first real field season. Despite experiencing the setbacks and equipment failures inherent in any first attempts at a complicated protocol, we obtained several good data videos from all three study sites.
Here’s a 7-minute video of our work and some of the fish video:
Each data set consists of a stereo pair of high-definition videos of feeding fish (calibrated for 3-D measurement), a drift net sample representing the prey available to the fish in the water column during the time we were filming, and diet samples from several fish collected immediately after filming. Ideally the stomach samples come from the same fish we observed on video, and we had a high success rate capturing the exact fish we wanted with a well-placed dry fly (except for the tiny Chinook salmon, which we captured with a dip net). We also collect physical data such as water temperature and a spatially explicit map of water velocity, which we measure with the 3-D video system by throwing velocity tracers (neutrally buoyant pieces of Israeli cous cous) into the water upstream of the filming location after we’re done with the fish. We will use these data to test model predictions of the feeding behavior of the fish against many aspects of their real feeding behavior, including the spatial distribution of prey captures, the size structure of their diet, and the rate of prey captures.
First we worked on the Chena, filming very young juvenile Chinook salmon.
A tarp protected our solar battery and the viewers receiving and recording the HDMI feed from the cameras.
A drift net was generally placed in line to experience a similar density of insects as the fish we filmed, but far enough away that we could place and remove it without disturbing the fish.
On the Chena we used a 100-micron drift net side-by-side with our standard 250-micron net to capture the tiniest prey consumed by small juvenile salmon.
After the Chena and a two-day break to fix or modify equipment, we backpacked hundreds of pounds of sampling gear far up Panguingue Creek to film its small population of dwarf dolly varden. Half-way through this trip, Professor Grossman came up from Georgia to join us for the remainder of the month’s sampling.
We photograph every specimen we stomach pump, so that we can determine which diet samples correspond to which fish on the video.
After another two-day break to upgrade our batteries, camera mounts, and other things, we boated to the Clearwater to begin work on Arctic grayling. The beautiful sunny weather we experienced on Panguingue Creek was replaced by a smoky haze as a million acres of Alaska went up in flames in every direction (but none close enough to threaten us directly).
The smoke turned the sun a crazy shade of red in the evening.
The purpose of the balloon is to prevent boats from running over our cameras.
Each trip ended with a long list of things to make, fix, do, or improve. By the end of our last video recording we were limping back to base camp at midnight after a 14-hour day, covered in no-see-um bites (never previously a problem for me in Alaska, they were as bad as North Slope mosquitos for an hour or so), in a jetboat jump-started from a camera battery which only had juice left because of a different glitch in that system. The thickest midge hatch I’ve ever seen made it impossible to drive the boat without sunglasses, and even then I was constantly wiping my eyes to clear out the ones that slipped past the glasses. We all slept really well that night.
As you can see in the video, it wasn’t all that rough. We all had some fun fly fishing during breaks in places that wouldn’t disturb our filming. Josh and Sierra, our field techs, are both fairly new to the sport but catching on fast:
We look forward to returning to the field in July with everything relatively streamlined and polished, ready to collect even better data.
We had to capture a small number of grayling or dolly varden this year to begin experiments on their feeding behavior and learn how to adjust the lab environment for their capabilities. By the time we were ready to receive fish (October 1st), winter was already creeping in on our study stream in the foothills of the Alaska Range.
My job was to bushwhack up the creek with a bucket of water and a bunch of other supplies to catch fish and keep them safe for transport. I tried using my fly rod and some collapsible minnow traps, and I also brought a GoPro on a telescoping pole with an HDMI live viewer to scope out the locations of fish I might not find otherwise.
It was generally more difficult to find fish at this time of year than during the summer. Grayling were nowhere to be seen, but I found a few dolly varden in the biggest pools. The minnow traps were completely ineffective, even when placed in a pool right next to dollies I found on camera. But my fly fishing skills did not fail me.
Like the Chinook salmon, the dollies we collected survived the trip to Georgia in great shape. However, I was asked to send a few more a couple weeks later. Unfortunately, conditions on the creek were not very conducive to catching fish.
Not wanting to completely give up after the long drive, my friend Trevor (a labmate at UAF who also finished his Ph.D. this summer) and I hiked three miles up the icy river bed searching for fish. We stuck the GoPro through gaps in the ice to investigate all sorts of likely habitat, but there were almost no fish to be found — just a few that spooked out of the shallowed riffles and were long gone before we could try to catch them.
The only fish we could have collected was a slimy sculpin we found, frozen solid and perfectly preserved, out in the open on top of the ice. We left it to rest in peace.
Testing a new understanding of drift-feeding fish behavior.